Skip to main content
Main navigation
Home
Muti-agent deep reinforcement learning
KAUST researchers propose a distributed coordination framework for heterogeneous non-terrestrial networks
2 min read ·
Wed, Nov 12 2025
Press Releases
NTN Communication
Muti-agent deep reinforcement learning
UAV communications
HAPSs
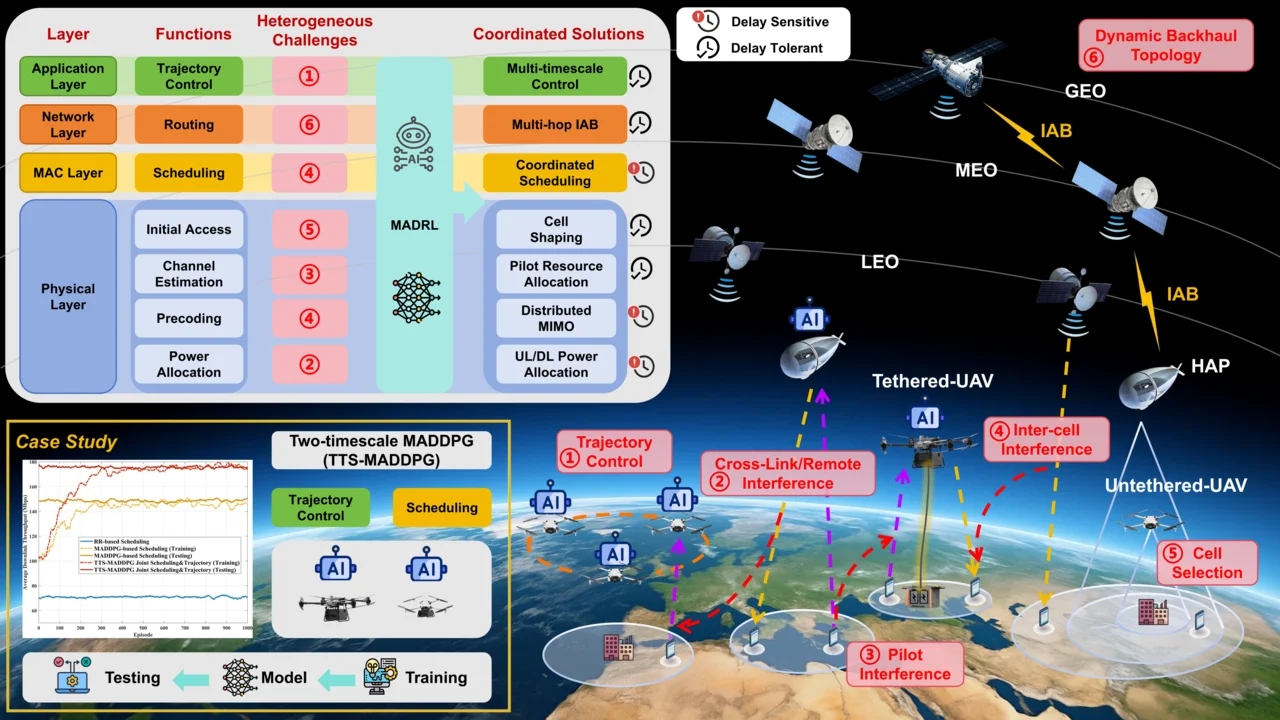
First analyzed the unique characteristics of non-terrestrial networks (NTN) platforms with impact on network specification, and proposed an efficient distributed coordination framework for heterogeneous NTN, verified by a case study on IAB-enabled heterogeneous UAV networks.